Индуктивные датчики. Разновидности, принцип работы. Емкостные датчики и реле схемы Сделать индуктивный датчик для сигнализации
Для обеспечения нормальной работы двигателя используется множество механизмов и контроллеров, предназначенных для выполнения разных функций. Одним из таких девайсов является индуктивный датчик. Что это за контроллер, каков его принцип работы, какие бывают виды устройств? Об этом мы поговорим ниже.
[ Скрыть ]
Характеристика индуктивных преобразователей
Индуктивный датчик или представляет собой бесконтактное устройство, предназначенное для контроля положения того или иного объекта, выполненного из металла. Это важно, поскольку девайс может проявлять чувствительность только к металлу.
Функции и принцип действия
Принцип действия девайса основан на изменении амплитуды колебаний генераторного устройства, встроенного в контроллер, при внесении в активную зону определенного металлического объекта. Соответственно, применение девайса возможно только с такими типами объектов. При подаче напряжения на конечный выключатель, который находится в зоне чувствительности, появляется магнитное поле. Это поле способствует образованию вихревых токов, влияние которых отражается на изменении амплитуды колебаний генераторного устройства.
В итоге такие преобразования способствуют появлению аналогового выходного импульса, значение которого может быть разным в зависимости от расстояния между контроллером и объектом. Индуктивный датчик перемещения играет очень важную роль для узлов, которые используются для отслеживания изменения места расположения металлических объектов. Благодаря контроллеру определяется, правильно ли расположен тот или иной объект или нет. В том случае, если предмет находится не там, где нужно, система управления должна будет предпринять все необходимые действия для того, чтобы обеспечить нормальную работу устройства.
Что касается устройства контроллера, то девайс состоит из следующих элементов:
- Генераторный узел, предназначенный для образования электромагнитного поля, которое, в свою очередь, используется для создания зоны активности с объектом.
- Усилительное устройство. Используется для повышения значения амплитуды импульса, чтобы сигнал мог достигнуть нужного параметра.
- Триггер Шмитта. Этот элемент предназначен для обеспечения гистертезиса при переключении девайса.
- Диодный элемент, который свидетельствует о состоянии контроллера. Также светодиод позволяет обеспечить наиболее оптимальный контроль функционирования девайса и указать на оперативность настройки.
- Следующий элемент — компаунд. Его предназначение заключается в обеспечении защиты девайса от попадания влаги внутрь корпуса, а также грязи и пыли, что может привести к его поломке.
- Сам корпус. Корпус контроллера предназначен для обеспечения установки девайса, а также его защиты от всевозможных механических повреждений. Как правило, корпус выполняется из латуни либо полиамида, а также он оснащается всеми необходимыми фиксаторами для крепления (автор видео — канал Lty D).
Типы контроллеров
Системы с индуктивным датчиком могут использовать разные устройства, которые отличаются между собой по следующим параметрам:
- Конструкция девайса, а также тип корпуса, который может быть прямоугольным либо цилиндрическим. Что касается материала, из которого выполняется сам корпус, то он может быть либо металлическим, либо пластмассовым.
- Если речь идет о цилиндрических деталях, то они могут иметь разные размеры корпуса. Как правило, диаметры корпуса составляют 12 и 18 мм, но можно найти и другие девайсы- 4, 8, 22 мм и т.д.
- Следующий параметр — рабочий люфт девайса, составляющий расстояние до стальной пластины контроллера. Для небольших по размерам контроллеров этот показатель составляет от 0 до 2 мм, для контроллеров, диаметр которых составляет 12 и 18 мм, рабочий зазор должен быть 4 и 8 мм соответственно.
- Число проводов для подключения к бортовой сети. Двухпроводные устройства более удобны в плане установки, однако они чувствительно относятся к нагрузке — при слишком высоком или низком сопротивлении их работа может быть нарушена. Трехпроводные детали на сегодняшний день считаются самыми распространенными, в данном случае два контакта используется для питания, а еще один — для нагрузки. Есть также пяти- и четырехпроводные регуляторы, в которых пятый контакт используется для выбора режима функционирования.
- Еще один параметр, по которым устройства могут отличаться, заключается в различии полярности. Релейные датчики позволяют коммутировать нужное значение напряжения или один из контактов питания. В транзисторных датчиках типа PNP на выходе устанавливается специальный транзисторный элемент, позволяющий коммутировать плюсовой выход. Что касается минуса, то в данном случае он подключен постоянно. Также есть транзисторные устройства NPN, в данном случае постоянно запитан плюс, а мину коммутируется транзисторным элементом.
Фотогалерея «Схемы подключения»
Достоинства и недостатки
Индуктивный датчик вращающихся оборотов (к примеру, ДПКВ) или другого типа, как и любое устройство, может иметь свои достоинства и недостатки. Предлагаем с ними ознакомиться.
Начнем с преимуществ:
- Во-первых, такие регуляторы характеризуются достаточно простой конструкцией, что позволяет обеспечить высокую надежность их работы. Конструктивно в элементе отсутствуют скользящие контакты, благодаря чему обеспечивается надежная работа датчика, так как контакты не изнашиваются и не выходят из строя.
- При необходимости такой регулятор можно своими руками подключить к электрической сети с промышленной частотой.
- Повышенная чувствительность регулятора, что позволяет обеспечить его наиболее эффективную и бесперебойную работу.
- При необходимости такие приборы могут работать в условиях высоких выходных мощностей.
Что касается недостатков:
- Нелинейные значения могут привести к появлению погрешностей, что связано с использованием принципа индуктивного преобразования.
- Правильная работа детали возможна при определенной температуре. Если температура не будет соответствовать нормированному диапазону, это может привести к появлению больших погрешностей.
- Появлению погрешностей могут способствовать и образование электромагнитного поля вне датчика.
Цена вопроса
Стоимость товара зависит от многих характеристик, в частности, области применения. В среднем цены на индуктивные регуляторы начинаются от 500 рублей и выше.
Видео «Как подключить индукционный регулятор?»
Наглядная инструкция на примере подключения регулятора в мотоцикле Юпитер приведена в ролике ниже (автор — Вадим Карамов).
Различного типа датчики сегодня широко применяются в промышленности. Без них ни один технологический процесс не обходится. Существует несколько их видов, нас же в этой статье будет интересовать индуктивный датчик. Поэтому разберемся, для чего он необходим, где применяется, его устройство и принцип работы.
По сути, датчик данного типа – это прибор, принцип работы которого основан на изменениях индуктивности катушки и сердечника. Кстати, отсюда и само название. Изменения индукции происходят из-за того, что в магнитное поле катушки проникает металлический предмет, изменяя его. А соответственно и изменяется схема подключения, в которой основную роль играет компаратор. Он при изменении индукции подает сигнал на реле или конечный транзистор (выключатель), что приводит к отключению подачи электрического тока.
Поэтому основное предназначение данного прибора – это измерять перемещение части оборудования. И при превышении пределов проходимости отключать его. При этом у датчиков есть свои пределы перемещения, которые варьируются в диапазоне от 1 микрона до 20 миллиметров. Кстати, именно поэтому этот прибор называют и индуктивным датчиком положения.
Достоинства и недостатки
Начнем с достоинств:
- Простота конструкции, достаточно высокая его надежность. Полное отсутствие скользящих контактов, которые быстро выходят из строя.
- Можно использовать для подключения в электрические сети с промышленной частотой.
- Высокая чувствительность.
- Может выдерживать большую выходную мощность.

Недостатки:
- Напряжение и точность работы датчика взаимосвязаны, поэтому нестабильное напряжение в сети становится причиной разброса пределов реагирования.
Параметры индуктивного датчика
Один из параметров уже описывался выше – это диапазон срабатывания. Хотя, как утверждают специалисты, он не является важным, но именно по нему и делают выбор. Все дело в том, что в паспорте изделия указываются номинальные параметры напряжения при работе прибора в температурном режиме +20С. Постоянное напряжение составляет 24 вольт, переменное – 230 вольт. Как вы понимаете, в таких условиях индукционный датчик обычно не работает, а если и работает, то редко. При этом в качестве объекта, который будет изменять индуктивность катушки прибора, должна выступать стальная пластина, ее ширина должна быть равна трем диапазонам срабатывания и толщиною 1 мм.

На практике же за основу выбора берут два показателя диапазона срабатывания:
- Эффективный.
- Полезный.
Показания первого отличаются от номинального параметра в пределах ±10%. При этом температурный диапазон расширяется от +18С до +28С. Второй определяется, как ±10% от первого при температурном режиме от 25 до 70С. И если при первом параметре используется номинальное напряжение в сети, то при втором присутствует разброс от 85% до 110% от номинала.
Есть еще один параметр, который связан с зоной срабатывания. Это гарантированный предел. Его нижняя часть равна «0», а верхняя 81% от номинального диапазона.

Необходимо учитывать и такие параметры, как гистерезис и повторяемость. Что такое гистерезис в этом случае? По сути, это расстояние между дальними позициями срабатывания датчика. Оптимальное его значение – это 20% от эффективного диапазона срабатывания.
Не последнее значение имеет и материал, из которого изготавливается объект слежения (перемещения). Оптимальный вариант – сталь 37, ее коэффициент редукции равен «1». Все остальные металлы имеют меньший коэффициент. К примеру, нержавейка – 0,85, медь – 0,3. Как понять, на что влияет коэффициент редукции? Для примера возьмем медную пластину. То есть, получается так, что диапазон срабатывания будет равно 0,3, умноженному на полезный диапазон срабатывания. Достаточно низкий показатель.
Перечислим и другие не столь важные параметры6
- Постоянное напряжение имеет диапазоны: 10-30, 10-60, 5-60 вольт. Переменное 98-253 вольт.
Внимание! Производители сегодня предлагают так называемые универсальные индукционные датчики, которые могут работать и от сети переменного тока, и от сети постоянного.

- Ток нагрузки (номинальный) – 200 мА. Сегодня производители иногда производят датчики с токовой нагрузкой 500 мА. Это так называемое специсполнение.
- Частота отклика. Суть этого параметра заключается в том, что он показывает максимальное значение возможности переключаться. Измеряется данный параметр в герцах. Так для основных промышленных датчиков этот показатель равен 1000 Гц.
Способ подключения
Существует несколько разновидностей индуктивных датчиков, которые имеют разное количество проводов подключения.
- Двухпроводные. Включаются прямо в цепь токовой нагрузки. Самый простой вариант, но очень капризный. Для него нужен номинальное сопротивление нагрузке. Если он снижается или увеличивается, прибор начинает работать некорректно. При подключении к сети постоянного тока, необходимо соблюдать полярность.
- Трехпроводной. Это самые распространенные индукционные датчики, в которых два провода подключаются к напряжению, один к нагрузке.
- Четырех-, пятипроводные. В них два провода подключаются к нагрузке. Пятый провод – это возможность выбора режима работы.

Цветовая маркировка выводов
Все, что связано с электрическими сетями, особенно проводниками, обязательно обозначается цветовой маркировкой. Делается это для удобства проведения монтажа и обслуживания. Индуктивный датчик этого также не избежал. В нем выходы обозначены определенными стандартными цветами:
- Минус – синий цвет.
- Плюс – красный.
- Выход – черный.
- Бывает и второй выход, он белого цвета, который может быть и входом в систему управления. Об этом производитель обязательно информирует в инструкции.

И последнее – это конструктивные особенности, которые касаются корпуса датчика. Он может иметь цилиндрическую или прямоугольную форму. Изготавливается из металлических сплавов или пластика. Чаще всего в промышленности используются цилиндрические приборы диаметром 12 или 18 мм. Хотя есть в этой размерной линейке и другие параметры: 4, 8, 22 и 30 мм.
Высоковольтный емкостной датчик (далее датчик) – устройство для снятия формы вторичного напряжения системы зажигания и последующей передачи его на один из входов регистрирующего оборудования.
Датчик состоит из держателя, емкостной пластины, которая гальванически соединена с сигнальным проводом, экранированного кабеля и соответствующего разъема для подключения датчика к входу регистрирующего оборудования.
Из чего следует:
1. Сигнал на выходе датчика будет тем больше чем ближе емкостная пластина к токопроводящей жиле ВВ провода.
2. Влияние электромагнитных наводок с соседних ВВ проводов будет тем меньше чем меньше размер емкостной пластины и чем меньше не экранированный участок сигнального провода.
4. Емкостная связь представляет собой дифференцирующую цепочку (ФВЧ) пропускающую высокочастотные колебания (область пробоя), и не пропускающую низкочастотные колебания (область горения), т.е. форма вторичного напряжения на выходе датчика будет искажена.

Сд – емкость между токопроводящей жилой ВВ провода и емкостной пластиной датчика
Rвх – входное сопротивление регистрирующего оборудования
Свх – входная емкость не учитывается, так как она фактически в данном случае ни на что не влияет
На графике красного цвета изображен исходный сигнал (меандр 1 КГц, скважность 10%, амплитуда 1 В)
На графике синего цвета изображен сигнал, полученный на выходе дифференцирующей цепочки

Сигнал с выхода датчика без использования компенсационной емкости
Для устранения искажения формы вторичного напряжения на выходе датчика, необходимо использовать дополнительную компенсационную емкость, которая с емкостью датчик-жила образует емкостной делитель:

Без учета входного сопротивления регистрирующего оборудования, коэффициент передачи емкостного делителя определяется следующим соотношением: Kп = Сд / (Сд + Ск) . Как видно из соотношения, чем больше значение емкости Ск тем меньше будет значение напряжения на выходе емкостного делителя. Для идеального емкостного делителя без учета входного сопротивления регистрирующего оборудования Ск можно взять сколь угодно малое, при этом форма сигнала на выходе делителя в точности будет соответствовать форме сигнала на его входе.
При учете входного сопротивления соотношение для определения коэффициента передачи становится гораздо объемнее, но зависимость Kп от Ск остается той же. Входное сопротивление регистрирующего оборудования на прямую не влияет на Kп, оно определяет “степень вносимого искажения”.

При увеличении входного сопротивления искажения формы вторичного напряжения значительно уменьшаются. В большинстве случаев входное сопротивления практических все осциллографов используемых для автодиагностики находится в диапазоне 1 МОм, за исключением специализированных входов предназначенных исключительно для подключения ВВ датчиков. По этому при непосредственном подключении датчика к входу осциллографа (без специализированного адаптера) Rвх также можно принять за константу, и ограничится варьированием только Ск.
Примечание!
Подключение датчика к входу осциллографа просто через резистор 10 МОм приведет к увеличению входного сопротивления и соответственно уменьшению искажения формы вторичного напряжения, но при этом примерно в десять раз уменьшиться коэффициент передачи входного тракта канала. Для увеличения входного сопротивления без уменьшения коэффициента передачи необходимо использовать промежуточный буфер (повторитель – простейший адаптер) с высоким входным сопротивлением и низким выходным сопротивлением.
Для текущих Сд (точно не известно) и Rвх (обычно 1 МОм) значение Ск подбирается исходя из компромисса:
1. Чем меньше Ск тем больше амплитуда напряжения на выходе емкостного делителя
2. Чем больше Ск тем меньше степень искажения формы вторичного напряжения
Практически значение Ск возможно увеличивать до тех пор, пока “амплитуда” напряжения на выходе емкостного делителя будет достаточно выделяться на фоне шума.

Местоположение подключения Ск: в начале кабеля (ближе к емкостной пластине) или в конце кабеля (ближе к входу регистрирующего оборудования) – практически не влияет на форму и амплитуду сигнала с выхода датчика.

На графике красного цвета изображен сигнал, полученный с ВВ датчика и Ск = 3.3 нФ подключенной на входе осциллографа, на графике синего цвета изображен сигнал, полученный с ВВ датчика и Ск = 3.3 нФ подключенной непосредственно возле емкостной пластины. Как видно форма сигналов практически одинакова, а амплитуда различается в пределах разброса номинала используемых емкостей +/- 20%.
Примеры осциллограмм вторичного напряжения снятого одним и тем же датчиком с емкостной пластиной в виде круга диаметром ~10 мм при разных значениях Ск, на стенде с DIS катушки 2112-3705010 (форма вторичного напряжения несколько отличается от привычной из-за разряда на открытом воздухе).

Ск = 470 пФ. Область горения значительно проседает, но амплитуда пробоя достигает 5 Вольт.

Ск = 1.8 нФ. Область горения также значительно проседает, амплитуда пробоя уменьшилась до 2 Вольт.

Ск = 3.3 нФ. Область горения не много проседает, амплитуда пробоя уменьшилась до 1 Вольта.

Ск = 10 нФ. Область горения практически не проседает, но и амплитуда пробоя уменьшилась до 0.4 Вольт.
Как видно при Ск = 10 нФ форма вторичного напряжения практически не искажена, а шум довольно не значительный.
Для сравнения приведены осциллограммы вторичного напряжения снятые с одного и того же ВВ провода без использования адаптера и с использованием специализированного адаптера зажигания.

На графике красного цвета изображен сигнал, полученный с ВВ датчика (Ск = 10 нФ) непосредственно подключенного к входу осциллографа. На графике синего цвета изображен сигнал, полученный с адаптера Постоловского, к которому подключен “родной” ВВ датчик Постоловского.
Как видно форма обеих сигналов практически совпадает, но с адаптера содержащего промежуточные усилители, сигнал имеет в 3 раза большую амплитуду.
Примечание!
Все адаптеры, использующие емкостные датчики искажают форму вторичного напряжения, но при высоком входном сопротивлении и достаточной Ск, вносимое искажение крайне не значительно.
В простейшем случае емкостной съемник это любой металлический предмет расположенный рядом с ВВ проводом, т.е. в роли емкостной пластины могут выступать зажим типа “крокодил”, фольга намотаня на ВВ провод, монетка и т.д.
Практически в качестве высоковольтного емкостного датчика рекомендуется использовать конструкцию, которая удовлетворяет следующим требованием:
1. Высокая степень защиты от пробоя
2. Малая подверженность электромагнитным наводкам от соседних ВВ проводов
3. Удобное конструктивное исполнение для быстрого подключения датчика к ВВ проводу
Примеры конструкции ВВ емкостных датчиков:


Жестяная пластинка 20x70 мм, выгибается, так что бы плотно прижиматься к ВВ проводу.

По сути, та же пластина только в изоляции.

ВВ датчик типа “прищепка”.

ВВ датчик аналогичный одной из конструкций Бош (поставляется по цене $7 / шт).
В качестве примера рассмотрим процесс изготовления ВВ датчика на основании выше приведенной конструкции компании Бош.
Для изготовления датчика необходимо:
1. Выше рассмотренная ручка ВВ датчика.
2. Экранированный кабель 1-3 м. Желательно использовать мягкий микрофонный кабель, так как при эксплуатации он намного удобнее жесткого коаксиального кабеля. Волновое сопротивление кабеля 50 или 75 Ом, значения не имеет, так как все исследуемые сигналы находятся в области низких частот.

3. Разъемы для подключения датчика к осциллографу или адаптеру зажигания BNC-FJ / BNCP / FC-022 Переходник гнездо F / BNC под F-ку (разъем один и тот же только у разных производителей / продавцов он по-разному называется).

BNC-M / FC-001 / RG58 / F разъем

Примечание!
При покупке F разъема и кабеля обращайте внимание на соответствие диаметра кабеля к диметру разъема для накрутки на кабель, иначе либо придется срезать часть изоляции кабеля для уменьшения его диаметра, либо наматывать ленту на кабель для увеличения его диаметра.
4.
Сальник / гермоввод / кабельный ввод PG-7 с дюймовой резьбой

5. Емкостная пластина “пятачок” диаметром 9-10 мм

“Пятачок” возможно либо вырезать из жести, либо использовать специальный пробойник (лучше всего использовать пробойник на 8 мм, после развальцовки получится “пятачок” диаметром чуть больше 9 мм):

Также в качестве “пяточка” возможно, использовать подходящие по диаметру канцелярские кнопки.

6. Компенсационная емкость – не полярный (лучше керамический) конденсатор номиналом от 2.2 нФ до 10 нФ на напряжение 50 Вольт (если использовать конденсатор на 1 КВ то в случае пробоя ВВ провода он все равно сгорит). Возможно использовать как выводные конденсаторы так и планарные в корпусе 1206 или 0805.
Порядок изготовления:
1. Удалить изоляцию с экранированного кабеля до оплетки, на участке 12-13 мм. Часть оплетки под снятой изоляцией вывернуть наружу и равномерно расположить вдоль кабеля. С сигнального провода снять изоляцию на участке 10-11 мм и залудить его.

2. Накрутить на кабель F разъем, так что бы он плотно держался на кабеле и хорошо контактировал с частью вывернутой оплетки. При этом сигнальный провод должен выступать на достаточную длину из F разъема для надежного контакта с центральным стержнем разъема BNC-FJ.

3. Накрутить разъем BNC-FJ на F разъем. После чего проверить наличие контакта (прозвонить тестером) между сигнальным проводом и центральным стержнем разъема BNC-FJ, между оплеткой кабеля и экраном разъема BNC-FJ и отсутствие контакта между сигнальным проводом и оплеткой кабеля.

4. Если есть сальник PG-7 то предварительно надеть его на кабель открутив с него гайку.
5. Удалить изоляцию и оплетку с противоположного конца кабеля, на участке 3-5 мм. С сигнального провода снять изоляцию на участке 2-3 мм. Припаять к залуженному сигнальному проводу емкостную пластину.

При необходимости припаять компенсационную емкость между сигнальным проводом и оплеткой.
6. Обмотать участок сигнального провода и припаеную компенсационную емкость изолентой, так что бы емкостная пластина не болталась и была поджата краем изоленты. После чего емкостную пластину обильно смазывать солидолом.

Солидол “улучшает” диэлектрическую проницаемость и устраняет скачки области горения.

На графике красного цвета изображен сигнал, полученный с ВВ датчика (Ск = 3.3 нФ) без солидола. На графике синего цвета изображен сигнал, полученный с ВВ датчика (Ск = 3.3 нФ) с использованием солидола. Без использования солидола область горения иногда “подскакивает” на 20-30%.
7. Надеть ручку ВВ датчика так, что бы емкостная пластина упиралась в дно колпачка датчика. После чего зажать кабель либо с помощью сальника PG-7 либо закрепить изолентой (при этом с датчиком нужно обращаться крайне осторожно, что бы случайно не вырвать кабель из ручки датчика).

В результате должен получится высоковольтный емкостной датчик, который возможно непосредственно подключать к одному из аналоговых (с наличием Ск) или к логическому (без Ск) входов осциллографа.
Как обычно давайте сначала чуть углубимся в теорию.
Индуктивный датчик - бесконтактный датчик, предназначенный для контроля положения объектов из металла. В основу его работы положено свойство дросселя с воздушным зазором изменять свою индуктивность при изменении величины воздушного зазора.
В данной схеме мы видим катушку в составе колебательного контура, частота колебаний которого (и вытекающая из этого индуктивность) зависит от расстояния между катушкой и феромагнитным материалом. Измеряя индуктивность (или амплитуду колебаний) можно делать выводы относительно расстояния между катушкой и феромагнитным материалом.
Это принцип используется в индуктивных датчиках приближения. Упрощенная функциональная схема выглядит следующим образом. Генератор создает колебания в катушке, при изменении амплитуды колебаний выше (или ниже) порогового значения, срабатывает триггер и подает на выход логический ноль (или единицу, в зависимости от настроек).

1. Генератор создает электромагнитное поле взаимодействия с объектом
2. Триггер переключает состояние логического выхода
3. Комплексная защита защищает датчик от переполюсовки, помех по питанию
4. Ключевая схема создает выходной сигнал датчика
Такие датчики крайне широко используются в промышленности, например, в станкостроении, автомобильной отрасли и т.д.

Зачем такой датчик потребовался мне? Небольшая предыстория.
В свое время, году в 2011-2012 (за давностью уже точно не помню) на Kickstarter появился новый многообещающий стартап – 3Д принтер Makibox. Обещания были просто космические- за 200 USD (на секундочку, 2012 год!) полностью функциональный, отлично выглядящий и работающий 3Д принтер с подогреваемым столом. Доставку обещали включить в цену. Ближайшие доступные конкуренты тогда стоили около 800-1000 USD.

Выглядел он на фотках просто шикарно. Дальше началась вполне обычная для Кикстартера песня – срыв сроков поставки на год, повышение цены и т.д. Мне просто фантастически повезло, т.к. я был в первых рядах, то почти через 2 года с момента оплаты, я получил в первой и последней партии свой принтер за 350 USD (так подросла цена) с 4 катушками пластика (компенсация за «не помню что»). С учетом пластика получилось весьма недурственно. Затем фирма лопнула и тысячи вкладчиков остались ни с чем.
У меня даже сохранилось видео работы Макибокса. Ниже кадр первого запуска и первая деталь, которая даже не смогла допечататься.

Проблемы посыпались сразу и валом. Печатающая головка (hot end) намертво забивалась пластиком в течении первых пяти минут работы с гарантией 99%, через пару дней экспериментов накрылся экструдер (система подачи пластикового прутка), конструкция принтера была настолько непродуманная и хлипкая, что изделия гуляли и извивались во всех направлениях.
Надо сказать, что я все равно крайне был доволен тем, что ввязался в эту авантюру. Во-первых, я знал, на что шел. И в моем случае риск себя оправдал. А во-вторых, устраняя все огрехи конструкции, я досконально разобрался во всех аспектах и нюансах 3Д печати.
Печатающая головка был заменена на другую - E3D v.5. Экструдер напечатан новый, с жесткостью конструкции была проведена большая работа. И принтер начал печатать.
Но полностью устранить конструктивные просчеты было невозможно, а ходовые гайки из обычной пластмассы вызывали грусть, и понимание неизбежности скорого вырабатывания ресурса принтера.
И я решил собрать свой принтер. Технологию перемещения печатающей головки выбрал .
Вертикальную подачу стола я хотел сделать обязательно на ремнях, чтобы исключить искажения геометрии детали вдоль оси Z (wobbling). Также в голове сидели мысли – как бы подойти к решению проблемы выставления стола принтера «в горизонт».
На горизонтальности стола надо остановиться поподробнее. Это имеет непосредственно отношение к теме обзора и супер важно для качественной печати. Обычно все столы крепятся через систему пружинной регулируемой подвески в 3-х или 4-х точках.

И перед печатью необходимо долго и упорно гонять печатающую головку над столом и, крутя винты регулировки, добиваться максимально одинакового и точно заданного зазора (обычно 0.2-0.3 мм), причем на горячем (80-90 градусов) столе. Задача не самая, по правде говоря, интересная и увлекательная, да и обжечься можно. А т.к. настройки из-за вибрации и нагрева- охлаждения регулярно сбиваются, то эту процедуру надо повторять периодически. Причем процедура крайне важная – не будет идеального зазора и «горизонта» - деталь не приклеится к столу частично или полностью, и значит отвалится при печати или будет ужас какая кривая.
Поиски и раздумья привели меня к open source (свободно распространяемой) конструкции . Привлек меня в ней именно набор всех моих хотелок в одном флаконе: это и CoreXY, и вертикальная подача стола на ремне и герой нашего обзора – индуктивный датчик, используемый для калибровки стола.

Так как проект “открытый”, то существует большое сообщество энтузиастов, предлагающих всякие альтернативные улучшения и «фишечки». Посидев пару деньков над OpenSCAD, я определился с параметрами конструкции, распечатал необходимые детали, заказал недостающее в Китае.
Электроника, стол с подогревом, и шаговые двигатели взял с донора MakiBox. Дозаказать пришлось лишь 3 шкива под зубчатый ремень, собственно сам ремень, индуктивный датчик и несколько подшипников. Все влезло менее чем в 20 долларов.
И вот принтер собран.



Оптимизируя цену и конструкцию я погнался за двумя зайцами. Первый заяц – тишина. Я слышал как работают 3Д принтеры с линейными подшипниками – это громко. Они все же лязгают и для них нужны закаленные линейные направляющие.

И второй заяц, за которым я погнался – цена. Все же 12 подшипников и 6 осей стоят денег.
И надо сказать, что своих зайцев я догнал. В качестве осей взял незакаленные оси из разобранных струйных принтеров, 8мм в диаметре, а в качестве подшипников – выточил подшипники скольжения из маслонаполненного капролона. Оси из принтеров мне ничего не стоили, а на капролон я потратил 280 рублей и еще осталось на 3 или 4 комплекта. Работает механика практически бесшумно. Конечно с «песней» шаговых двигателей ничего поделать невозможно, но это меньшее из зол.


И наконец, герой нашего обзора. Фотку датчика отдельно возьму из сети, т.к. свой уже закреплен на 3Д принтере

И вот он на моем станке


Что делает индуктивный датчик? В прошивке 3Д принтера (я использую Marlin) есть раздел в котором описывается калибровка стола принтера. Можно указать 4 точки, в которых будет измеряться расстояние от датчика до стола.
Далее все очень и очень просто. Датчик проезжает по этим четырем точкам, опускает – поднимает стол и определяет расстояние между датчиком и столом. Растояние между столом и печатающей головкой в этих точках определяется как (Расстояние между датчиком и столом) – (Расстояние между датчиком и печатающей головкой).
Затем все эти величины учитываются прошивкой 3Д принтера, и начинается печать.
Так выглядит протокол обмена информацией в окне программы Repetier Host.

G28 – команда Homing (определение начальных положений по осям). Принтер гоняет печатающую головку до касания концевых датчиков осей
G29 – Это как раз Auto Leveling (Авто калибровка уровня). Проход по четырем точкам
Ниже результаты работы, расчет отклонения значений измерений четырех точек и необходимых поправок при печати.
И как водится, на самом принтере печатаем узлы для дополнительных компонентов. Напечатал держатель катушки с нитью.


И как всегда небольшое видео работы индукционного датчика и автокалибровки уровня стола принтера.
Резюме. Крайне недорогой прибор, который может серьезно облегчить жизнь владельцу 3Д принтера. Настоятельно рекомендуется к покупке.
Удачи и массы удовольствия от Ваших увлечений!
Планирую купить +38 Добавить в избранное Обзор понравился +40 +71Здесь же я отдельно вынес такой важный практический вопрос, как подключение индуктивных датчиков с транзисторным выходом, которые в современном промышленном оборудовании – повсеместно. Кроме того, приведены реальные инструкции к датчикам и ссылки на примеры.
Принцип активации (работы) датчиков при этом может быть любым – индуктивные (приближения), оптические (фотоэлектрические), и т.д.
В первой части были описаны возможные варианты выходов датчиков. По подключению датчиков с контактами (релейный выход) проблем возникнуть не должно. А по транзисторным и с подключением к контроллеру не всё так просто.
Схемы подключения датчиков PNP и NPN
Отличие PNP и NPN датчиков в том, что они коммутируют разные полюсы источника питания. PNP (от слова “Positive”) коммутирует положительный выход источника питания, NPN – отрицательный.
Ниже для примера даны схемы подключения датчиков с транзисторным выходом. Нагрузка – как правило, это вход контроллера.
Датчика. Нагрузка (Load) постоянно подключена к “минусу” (0V), подача дискретной “1” (+V) коммутируется транзистором. НО или НЗ датчик – зависит от схемы управления (Main circuit)
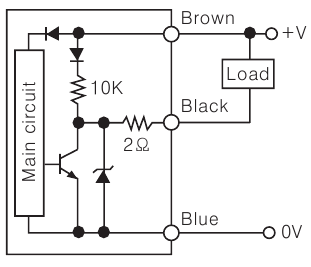
Датчика. Нагрузка (Load) постоянно подключена к “плюсу” (+V). Здесь активный уровень (дискретный “1”) на выходе датчика – низкий (0V), при этом на нагрузку подается питание через открывшийся транзистор.
Призываю всех не путаться, работа этих схем будет подробно расписана далее.
На схемах ниже показано в принципе то же самое. Акцент уделён на отличия в схемах PNP и NPN выходов.

Схемы подключения NPN и PNP выходов датчиков
На левом рисунке – датчик с выходным транзистором NPN . Коммутируется общий провод, который в данном случае – отрицательный провод источника питания.
Справа – случай с транзистором PNP на выходе. Этот случай – наиболее частый, так как в современной электронике принято отрицательный провод источника питания делать общим, а входы контроллеров и других регистрирующих устройств активировать положительным потенциалом.
Как проверить индуктивный датчик?
Для этого нужно подать на него питание, то есть подключить его в схему. Затем – активировать (инициировать) его. При активации будет загораться индикатор. Но индикация не гарантирует правильной работы индуктивного датчика. Нужно подключить нагрузку, и измерить напряжение на ней, чтобы быть уверенным на 100%.
Замена датчиков
Как я уже писал, есть принципиально 4 вида датчиков с транзисторным выходом, которые подразделяются по внутреннему устройству и схеме включения:
- PNP NO
- PNP NC
- NPN NO
- NPN NC
Все эти типы датчиков можно заменить друг на друга, т.е. они взаимозаменяемы.
Это реализуется такими способами:
- Переделка устройства инициации – механически меняется конструкция.
- Изменение имеющейся схемы включения датчика.
- Переключение типа выхода датчика (если имеются такие переключатели на корпусе датчика).
- Перепрограммирование программы – изменение активного уровня данного входа, изменение алгоритма программы.
Ниже приведён пример, как можно заменить датчик PNP на NPN, изменив схему подключения:

PNP-NPN схемы взаимозаменяемости. Слева – исходная схема, справа – переделанная.
Понять работу этих схем поможет осознание того факта, что транзистор – это ключевой элемент, который можно представить обычными контактами реле (примеры – ниже, в обозначениях).
А что там свежего в группе ВК СамЭлектрик.ру ?
Подписывайся, и читай статью дальше:
Итак, схема слева. Предположим, что тип датчика – НО. Тогда (независимо от типа транзистора на выходе), когда датчик не активен, его выходные “контакты” разомкнуты, и ток через них не протекает. Когда датчик активен, контакты замкнуты, со всеми вытекающими последствиями. Точнее, с протекающим током через эти контакты)). Протекающий ток создает падение напряжения на нагрузке.
Внутренняя нагрузка показана пунктиром неспроста. Этот резистор существует, но его наличие не гарантирует стабильную работу датчика, датчик должен быть подключен к входу контроллера или другой нагрузке. Сопротивление этого входа и является основной нагрузкой.
Если внутренней нагрузки в датчике нет, и коллектор “висит в воздухе”, то это называют “схема с открытым коллектором”. Эта схема работает ТОЛЬКО с подключенной нагрузкой.
Так вот, в схеме с PNP выходом при активации напряжение (+V) через открытый транзистор поступает на вход контроллера, и он активизируется. Как того же добиться с выходом NPN?
Бывают ситуации, когда нужного датчика нет под рукой, а станок должен работать “прям щас”.
Смотрим на изменения в схеме справа. Прежде всего, обеспечен режим работы выходного транзистора датчика. Для этого в схему добавлен дополнительный резистор, его сопротивление обычно порядка 5,1 – 10 кОм. Теперь, когда датчик не активен, через дополнительный резистор напряжение (+V) поступает на вход контроллера, и вход контроллера активизируется. Когда датчик активен – на входе контроллера дискретный “0”, поскольку вход контроллера шунтируется открытым NPN транзистором, и почти весь ток дополнительного резистора проходит через этот транзистор.
В данном случае происходит перефазировка работы датчика. Зато датчик работает в режиме, и контроллер получает информацию. В большинстве случаев этого достаточно. Например, в режиме подсчета импульсов – тахометр, или количество заготовок.
Да, не совсем то, что мы хотели, и схемы взаимозаменяемости npn и pnp датчиков не всегда приемлемы.
Как добиться полного функционала? Способ 1 – механически сдвинуть либо переделать металлическую пластинку (активатор). Либо световой промежуток, если речь идёт об оптическом датчике. Способ 2 – перепрограммировать вход контроллера чтобы дискретный “0” был активным состоянием контроллера, а “1” – пассивным. Если под рукой есть ноутбук, то второй способ и быстрее, и проще.
Условное обозначение датчика приближения
На принципиальных схемах индуктивные датчики (датчики приближения) обозначают по разному. Но главное – присутствует квадрат, повёрнутый на 45° и две вертикальные линии в нём. Как на схемах, изображённых ниже.

НО НЗ датчики. Принципиальные схемы.
На верхней схеме – нормально открытый (НО) контакт (условно обозначен PNP транзистор). Вторая схема – нормально закрытый, и третья схема – оба контакта в одном корпусе.
Цветовая маркировка выводов датчиков
Существует стандартная система маркировки датчиков. Все производители в настоящее время придерживаются её.
Однако, нелишне перед монтажом убедиться в правильности подключения, обратившись к руководству (инструкции) по подключению. Кроме того, как правило, цвета проводов указаны на самом датчике, если позволяет его размер.
Вот эта маркировка.
- Синий (Blue) – Минус питания
- Коричневый (Brown) – Плюс
- Чёрный (Black) – Выход
- Белый (White) – второй выход, или вход управления, надо смотреть инструкцию.
Система обозначений индуктивных датчиков
Тип датчика обозначается цифро-буквенным кодом, в котором зашифрованы основные параметры датчика. Ниже приведена система маркировки популярных датчиков Autonics. / Каталог датчиков приближения Omron, pdf, 1.14 MB, скачан:1247 раз./
/ Чем можно заменить датчики ТЕКО, pdf, 179.92 kB, скачан:1004 раз./
/ Датчики фирмы Turck, pdf, 4.13 MB, скачан:1336 раз./
/ Схема включения датчиков по схемам PNP и NPN в программе Splan/ Исходный файл., rar, 2.18 kB, скачан:2163 раз./
Реальные датчики
Датчики купить проблематично, товар специфический, и в магазинах электрики такие не продают. Как вариант, их можно купить в Китае, на АлиЭкспрессе.
А вот какие я встречаю в своей работе.
Всем спасибо за внимание, жду вопросов по подключению датчиков в комментариях!